Augmentation de la plage de fonctionnement d'un cobot
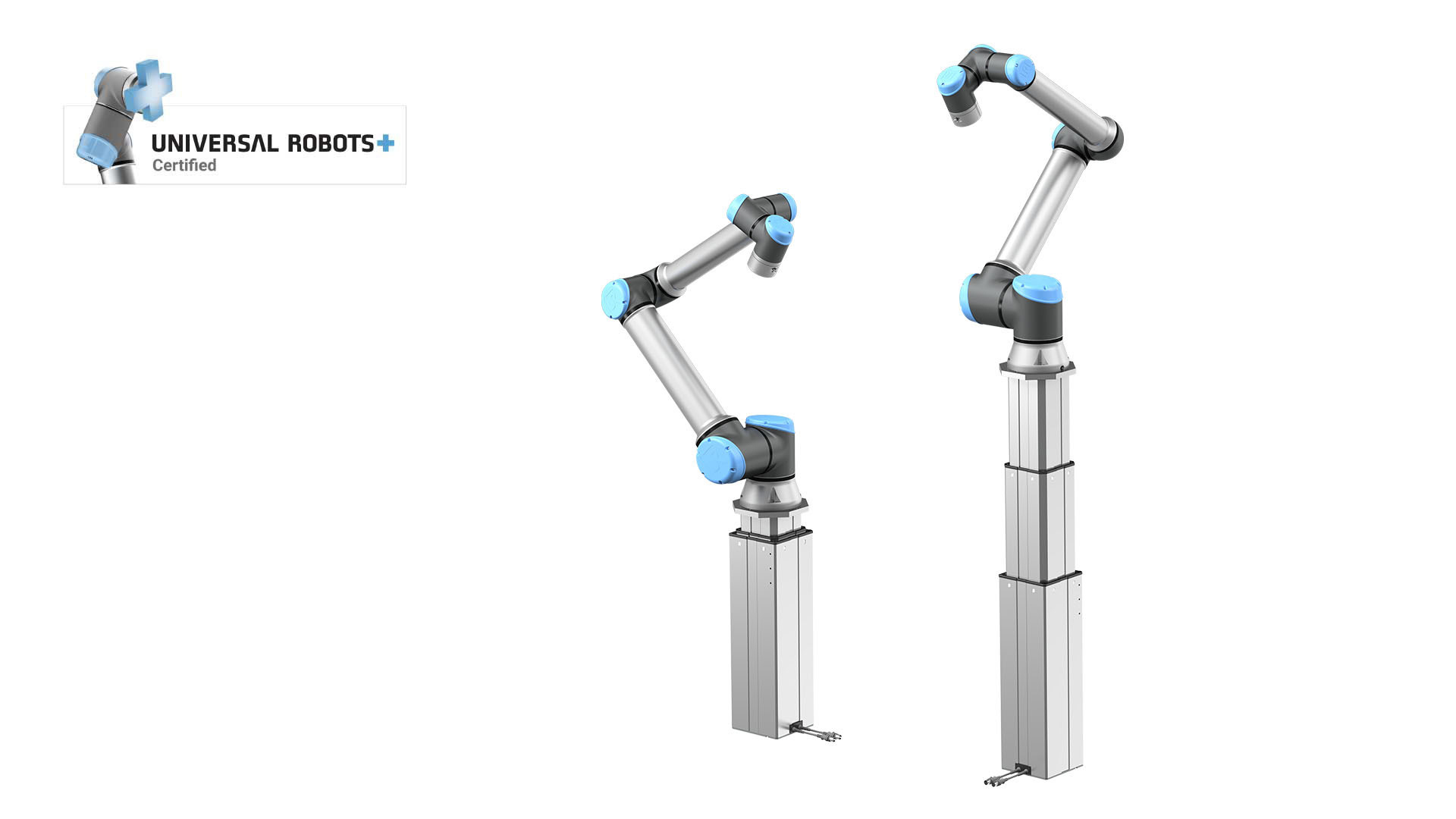
Compatible avec la gamme Universal Robot UR5 à UR16 (UR20 et UR30 sur demande)
Aucun développement de matériel/logiciel n’est nécessaire
Accès direct au positionnement dans un environnement contrôlé par UR
Positionnement rapide pour augmenter la productivité et réduire les coûts
Compatible avec le logiciel VISUAL COMPONENT
Caractéristiques
Axe de positionnement horizontal certifié UR+
Solution système complète prête à l'emploi
Plug-in logiciel (UR Caps) pour le système de contrôle UR inclus
Haut niveau de précision et de répétabilité du positionnement
Fonctionnement très silencieux
Nombreuses sont les applications nécessitant de parcourir de longues distances pour effectuer diverses opérations, comme la finition, la soudure ou l’inspection des pièces. /
Ces tâches répétitives, généralement effectuées manuellement, sont chronophages et présentent une faible valeur ajoutée pour les opérateurs.
En ajoutant un module linéaire comme base dynamique du robot, il est possible d’étendre la zone d'opération de manipulation du robot, ce qui augmente la productivité et la qualité.
Le SLIDEKIT 2.0 permet une installation rapide, grâce à une interface mécanique, électrique et logicielle standardisée pour les cobots Universal Robots.
En quelques étapes, le système est simple et rapide à programmer et à utiliser.
De plus, SLIDEKIT est également disponible avec une variante à usage général, utilisant des E/S numériques simples pour contrôler le mouvement, le rendant compatible avec d'autres marques de cobots.
Les cobots combinés avec le module linéaire SLIDEKIT 2.0 offrent une solution rentable pour améliorer un atelier d'assemblage existant, passant d'une ligne manuelle à entièrement automatisée.
La version 2.0 du SLIDEKIT offre plusieurs améliorations par rapport à la version précédente, comme une meilleure réactivité et une stabilité du système plus élevées, un bruit de fonctionnement plus faible et une conception optimisée pour les fins de courses et les points de relubrification.
Case studies:
Données techniques
Vue d'ensemble
SLIDEKIT-UR BE S00
SLIDEKIT-UR PE S00
SLIDEKIT-UR PE S20
Compatibilité avec Robot
UR3, UR5, UR10, UR16
UR3, UR5, UR10, UR16
UR20,UR30
Charge utile dynamique maximale (N)
10 900
10 900
16 000
Course max (mm)
1 800
3 000
3 000
Température de fonctionnement
0 à +50 °C
0 à +50 °C
0 à +50 °C
Type d’entraînement
Vis à billes
Courroie
Courroie
Montage
Montage au sol Montage au plafond Montage mural (latéral)
Montage au sol Montage au plafond
Montage au sol
Précision
± 0.01
± 0,08
± 0,08
Vitesse linéaire max (mm/s)
1 000
1 000
300
Facteur de marche (%)
100
100
100
2D / 3D
Le modèle CAO fourni ici peut différer des conditions réelles de livraison. Si nécessaire, veuillez nous contacter directement avant de compléter votre projet.
Ce produit est une solution personnalisée ; les modèles 3D ne sont donc disponibles que sur demande.
Utiliser ce formulaire pour nous contacter
EL-03012/2-EN-November 2024 - Linear technology for flexible assembly lines
EL-03018/1-EN -February 2023 - 7th axis solutions to boost your robot s capabilities
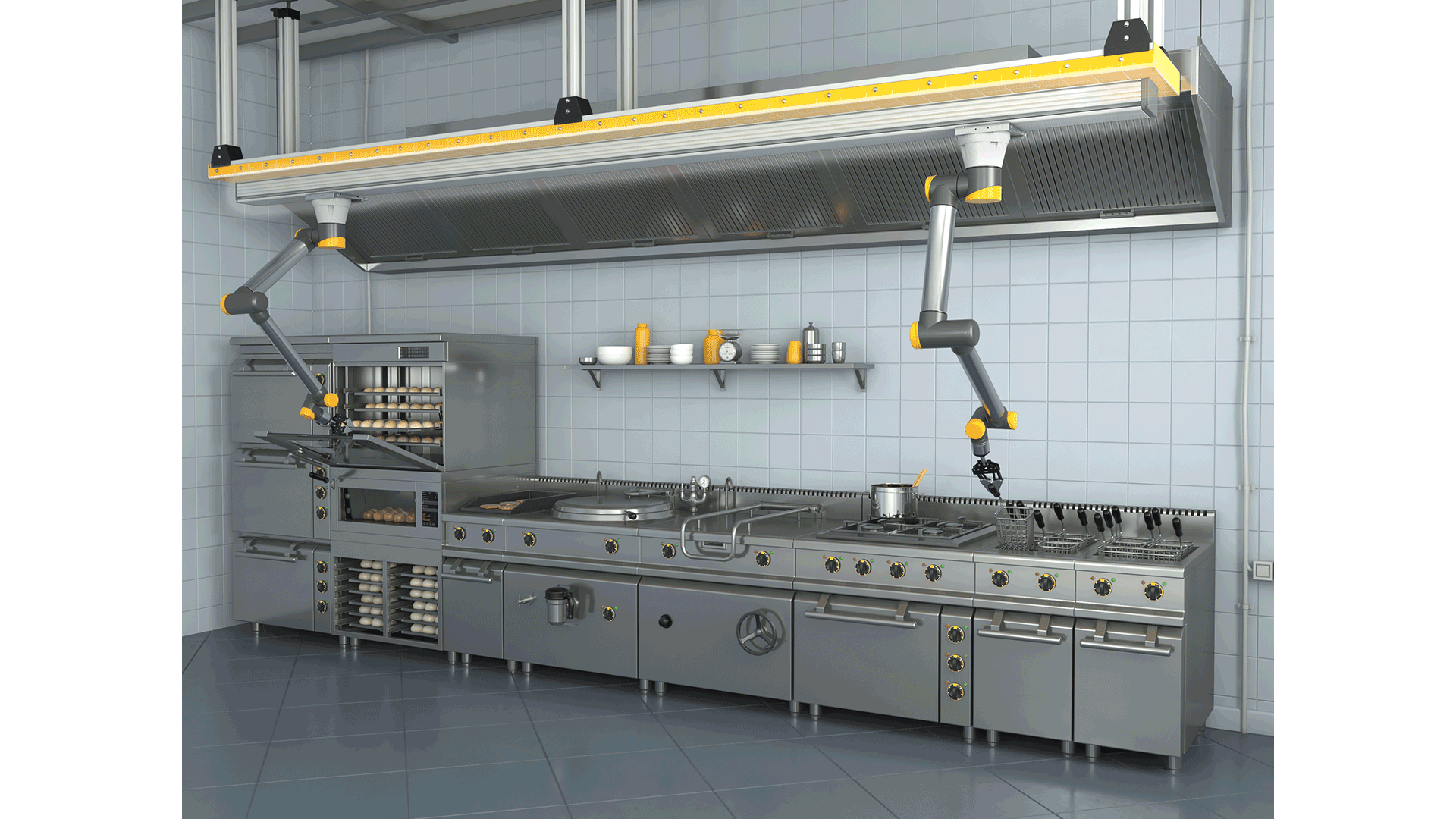
EL-03023/1-EN-November 2024 - Solution for food and beverage
Vidéo
Liftkit and slidekit - extend your possibilities
Questions fréquemment posées
Les glissières linéaires sont des systèmes mécaniques qui permettent un mouvement linéaire régulier et contrôlé le long d'un seul axe. Elles sont couramment utilisées pour étendre le champ d'action des robots, des machines à commande numérique et des systèmes automatisés. Dans l'automatisation industrielle, les glissières linéaires sont essentielles lorsque des tâches telles que le soudage, l'inspection ou l'assemblage nécessitent des déplacements sur des distances plus importantes que celles permises par un système stationnaire. En intégrant des glissières linéaires, les opérateurs peuvent automatiser des tâches répétitives de faible valeur avec une précision et une cohérence accrues, ce qui améliore la productivité globale et réduit les interventions manuelles.
En robotique, le mouvement linéaire désigne le déplacement contrôlé d'un composant robotique ou d'une charge utile le long d'une trajectoire rectiligne. Ce mouvement est généralement assuré par des actionneurs linéaires, des rails ou des glissières, et peut être horizontal ou vertical en fonction de l'application. En robotique collaborative, le mouvement linéaire est souvent utilisé pour augmenter l'enveloppe de travail d'un cobot en le montant sur une base ou un rail motorisé. Cela permet au robot d'effectuer des tâches dans une zone plus large sans avoir besoin de bras multiples ou de se repositionner, ce qui rend l'automatisation plus flexible et plus efficace.
Les glissières linéaires offrent plusieurs avantages : elles augmentent l'amplitude de mouvement des systèmes robotiques, permettent une précision de positionnement et une répétabilité élevées, et accélèrent les temps de cycle pour les tâches répétitives. Leur conception modulaire rend également leur intégration relativement simple, en particulier lorsqu'elles sont associées à des interfaces mécaniques et logicielles normalisées. Toutefois, les compromis comprennent la complexité accrue du système, la nécessité d'une maintenance périodique (telle que la lubrification) et l'encombrement du mécanisme à glissière lui-même. Dans les applications de haute précision, un alignement correct et un contrôle des vibrations sont également essentiels au maintien des performances.



 IL-07023/10-EN-October 2024 Linear axis for collaborative robots SLIDEKIT
IL-07023/10-EN-October 2024 Linear axis for collaborative robots SLIDEKIT
 TC-08036/9-EN-October 2024 - SLIDEKIT operating manual
TC-08036/9-EN-October 2024 - SLIDEKIT operating manual
 EL-03012/2-EN-November 2024 - Linear technology for flexible assembly lines
EL-03012/2-EN-November 2024 - Linear technology for flexible assembly lines
 EL-03018/1-EN -February 2023 - 7th axis solutions to boost your robot s capabilities
EL-03018/1-EN -February 2023 - 7th axis solutions to boost your robot s capabilities
 EL-03023/1-EN-November 2024 - Solution for food and beverage
EL-03023/1-EN-November 2024 - Solution for food and beverage