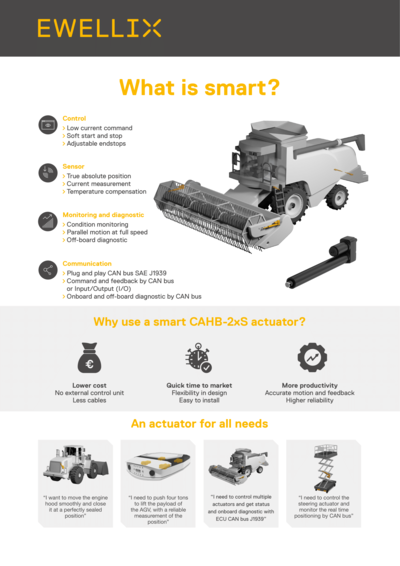
Réduction des coûts
Pas d’unité de contrôle externe Moins de câbles

Une mise sur le marché rapide
Flexibilité dans la conception Facile à installer

Plus de productivité
Mouvement et retour précis Une fiabilité accrue

Chargeuse sur pneus
Facile à contrôler avec une commande de courant faible
Besoin
« Je veux déplacer le capot moteur en douceur et le fermer à la position parfaitement étanche »
Solution
CAHB-2xS utilisé avec un mouvement de démarrage et d'arrêt progressifs et une position de fin de course réglable